【48812】数字PID温控器7参数辨识和扰动按捺
时间: 2024-08-06 23:23:56 | 作者: 教育培训
扩展阿斯特罗姆(Astrom, Karl Johan)的继电反应法在温控器中的使用,把开端仅辨识PID操控3参数(份额系数、积分和微分时刻常数)增加到包含温控体系中最大升温与降温率、均匀保持功率和操控周期在内的7参数(顺次标明为及时按捺扰动;根据温控体系的热容量巨细改变把温控的全进程划分在4种状况,差异处理。结果是STC温控器在热负载扰动下的操控功能极大的提高,可与国外知名品牌RKC比美。
关键词:数字PID温控器扰动按捺扩展的继电反应法温变速率法动态变参PID操控程序算法与流程
以纸管干燥机为例,烘房是操控目标;湿的纸管是物料,也可称为热负载,它经过传送带从烘房的一端进,在烘干后从另一端出。以下把热操控办理体系或温控体系简称为TCS(thermal control system)。
为进行有差异的适应性操控,以热容量为衡量能够把温控的全进程划分在4 种状况:空热负载状况(以下简称空载),此刻烘房内无纸管(物料);增加热负载状况(简称加载),此刻烘房内从无物料到物料逐步增多;安稳的热负载状况,此刻烘房内的物料量相对来说比较安稳;移除热负载状况(简称移载),此刻烘房内物料逐步移出直到空载。后3 种归于热负载改变状况(简称变载)。TCS 的空载状况下的温控是变载状况下温控的根底。
辨识包含2 个方面,一是针对在空载状况下TCS的上述7个固有热特征参数;二是针对在变载状况下的扰动源的2个特征性参数。这其间触及的3个参数要要点阐明。
3) 均匀保持功率(AMPow):它仅仅空载时的辨识参数,是指图4(a) 中在SV点附近在一个振动周期TC内的均匀加热功率。这个辨识量关于削减TCS在受扰动下的调理时刻和超调量很有用。在PID操控开端时AMPow应作为Dr的初始功率输出值。

7 参数辨识的理论按照是继电反应法,详见[1-2]。而继电反应法又是在Z-N(齐格勒- 尼科尔斯)规律[3]上发展起来的。
如图4(a) 所示, 把整个辨识进程分红6个阶段(S1~S2),以极值点或交点(温度曲线与SV线)作为这些阶段分界点(A 点到G 点);
③假如PV≥SV,则中止加热(令Dr = 0), 进入辨识的阶段1(S1),一起发动定时器(t=tA=0 秒),tA是在A 点的时刻;
④在S1,要用判别一阶后向差分的符号改变的办法求温度的极大点(B 点)。此点后进入S2;
⑥在S2,假如PV≤SV,则又开端全功率加热(令Dr = 100)升温, 记载tC并进入S2;
⑦在S3,要开端为核算AMPow收集数据(Dr 及其继续的时刻)直到辨识完毕;相似④,要求极小值TD,在D 点后进入S4;
⑧从S4开端(有些TCS 可能会延长到S5),记载升温的进程值,以便核算最大升温速率EL_TR_RM;
图6 所示是STC CH902( 左面那一个) 与RKCCH402(日本产知名品牌)二个温控器正在做辨识和按捺热负载扰动功能的比照测验,SV= 200 ℃,以电扇风冷作为加载及移载扰动源。
③做加载扰动时把til的时刻设为0 点,其它时刻目标是相对此点而言;相似,在移载扰动时把trl的时刻设为0 点,如图7 所示。
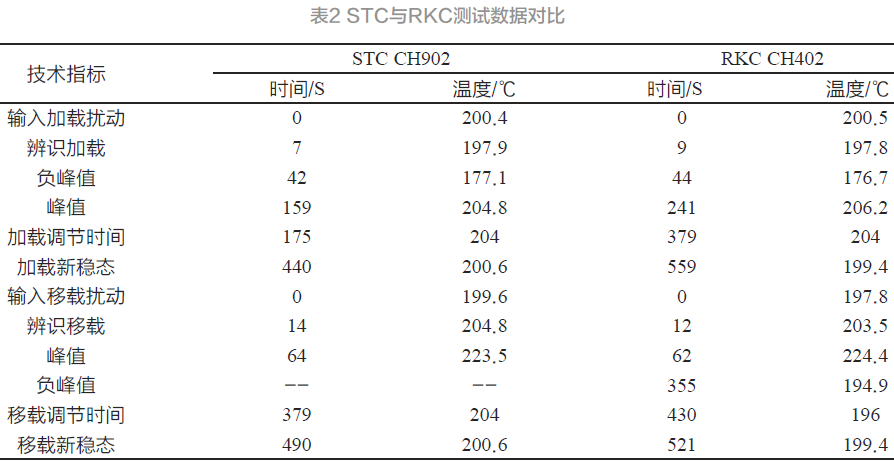
在表2 中能看到STC CH902 和RKC CH402 在辨识热负载方面有附近的功能(看目标的第2、3 及8、9 项),且二者都到达200±0.6 ℃的稳态差错。但在按捺负载扰动方面STC 更有用,不只峰值更低和负峰值更高,并且调理时刻及进入新的高精度稳态的时刻要更短(看目标的第4~6,10~12 项)。
表2 的数据标明扩展的继电反应法和温变速率法的结合使用能有用提高温控器在辨识和按捺扰动方面的操控功能。例如,在强风冷却扰动下最大差错(降温时)、超调量及调理时刻比之前别离削减9 ℃、3 ℃和6 分钟,稳态差错则同RKC。




