IJRR顶刊发布!浙大王越、熊蓉教授团队新型控制器实现人机交互新突破
时间: 2024-05-12 01:03:54 | 作者: 党群工作
原标题:IJRR顶刊发布!浙大王越、熊蓉教授团队新型控制器实现人机交互新突破
在机器人技术不断突破和社会需求日益多元的当下,人们对机器人在工业制造、生活服务、康复治疗等多元化场景中实现与人类更为密切、安全且高效的合作寄予厚望。然而,现实环境中存在的不确定性因素常常给物理人机交互(Physical Human-Robot Interaction, pHRI)带来挑战。例如,在协作过程中,机器人可能遭受突发的、不可预知的冲击干扰,这无疑威胁到任务执行的流畅性和安全性。尽管目前普遍的使用的线性导纳控制器(Linear Admittance Control, L-AC)虽然在处理高频小幅度噪声方面表现出色,但对于中频高强度的冲击的抑制不足。这可能会引起机器人在协作中无法同时兼顾顺应人类牵引力和抵抗外部冲击,进而可能打断协作进程,甚至造成安全隐患。
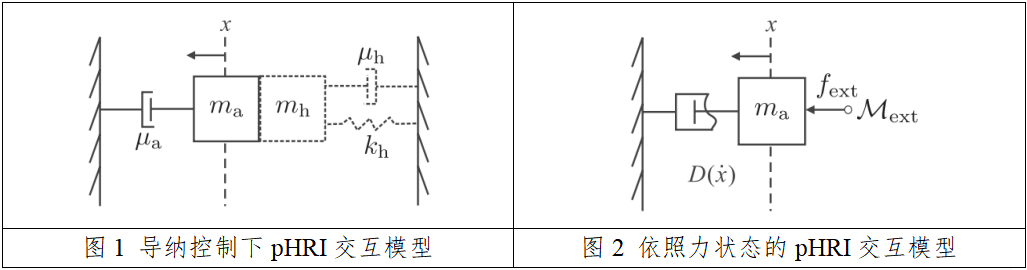
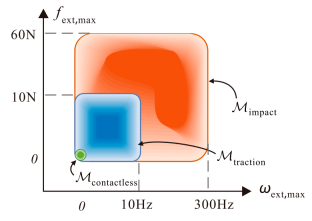
针对这一现实难题,浙江大学王越、熊蓉教授团队及腾讯Robotics X实验室合作,在继承传统导纳控制下人机紧耦合的模型基础分了无接触力、牵引力和冲击力的不同状态,并按实际力学特点为各力划分振幅和频率范围。如图3所示,冲击力集中于高频大振幅区域,而牵引力主要在较低的振幅和频率区段。研究目标是设计一种控制器,能够在有效抑制冲击力中高频高振幅成分的同时,保持对牵引力的良好顺应性,从而改善人机交互的安全性和舒适性。研究成果以“Compliance while resisting: A shear-thickeningfluid controller for physical human-robotinteraction”为题发表于机器人领域顶级期刊IJRR上。
导纳控制使机器人具有类似线性质量-刚度-阻尼系统的虚拟动力学特性,确保与人协作时能柔顺响应。然而,在顺应牵引力和抵抗冲击的情况下,线性模型难以区分不同强度和频率的力,这在某种程度上预示着在遭受到高强度冲击时,机器人可能会因为没有办法有效抑制冲击而产生急剧运动,这无疑会对近身的人机交互安全性造成风险,并可能降低任务执行的准确性。
研究团队意识到虚拟的动力学不应该限制于上面讲述的情况,也许能够最终靠引入其他的虚拟动力学模型来应对“顺应牵引力的同时抵抗冲击”的控制需求。他们在广泛研究中注意到自然界中剪切增稠流体的特殊性质,这类流体在受到轻微触碰时如同水流般柔韧,而在强烈撞击下则瞬间变得像石头一样坚固。因此,团队设想将剪切增稠流体的动态特性融入控制器设计中,以实现既顺应牵引又有效抗冲击的目标。

团队深入剖析了剪切增稠流体的本构方程,发现其重点是剪切应力与剪切速度之间的幂率非线性关系。通过借鉴流体的本构原理并结合机器人控制的实际的需求,成功研发了剪切增稠流体控制器(Shear-Thickening Fluid Controller, SFC),并在初步实验中证实了该控制器能够成功实现预期功能,有效兼顾顺应牵引与冲击抵抗,从而提升了物理人机交互的安全性。
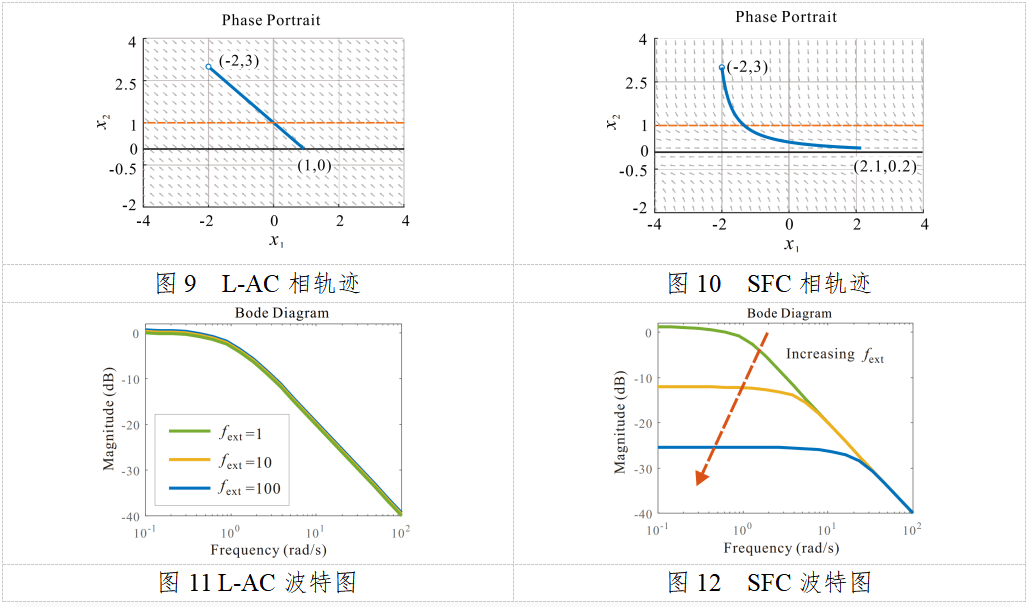
通过初步实验确立其实用性的基础上,研究团队深入挖掘了其背后的原理。团队选择了从相轨迹和波特图这两个经典控制理论工具出发,对比分析SFC与L-AC的动态性能差异。相轨迹揭示了机器人无外力时收敛至平衡的过程,SFC与L-AC对比显示,SFC在大速度偏差时快速回归稳定,速度收敛性优于L-AC;小偏差时保持平缓运动以顺应人类牵引。波特图揭示SFC对外力变化的响应,其独特“分层效应”表现为:随着外力增大,SFC响应曲线向下迁移,增益由放大转为衰减,且衰减效应随外力增强而增强。这表明SFC既能敏锐响应小牵引力,也能有力抵抗高强度冲击,而L-AC则不具备对外力的有效区分。
当前主流导纳控制多基于线性模型或变系数线性模型,非线性控制则聚焦于对象非线性特性而非控制器设计。为全面对比,团队选用最符合需求的非线性导纳控制(N-AC)与新研发的SFC比较。两者皆采用非线性阻尼,但表现各异:SFC阻尼仅与自身速度状态相关,而N-AC阻尼直接受外力影响。二者均可在逐渐增强的外力下实现递减频率响应,然而在高强度外力下,N-AC阻尼受限于固定极限,对冲击抑制效果不及SFC。另外,N-AC阻尼随外力消失迅速下降,导致系统恢复慢;而SFC的非线性项独立于外力,可在速度大幅偏离时保持比较高阻尼水平,加速系统回归稳定。图13至图15刻画了L-AC、N-AC和SFC在幅频响应、阶跃响应及时间常数等方面性能对比,展示了SFC在抵抗冲击干扰、保持稳定协作及迅速恢复稳态等方面的性能优势。
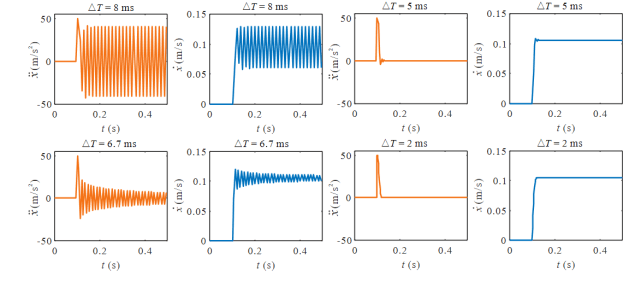
SFC控制器作为非线性系统稳定性更复杂,团队运用李雅普诺夫理论确保其在连续系统下稳定且能有效耗散能量。在实际应用中,由于离散化处理需求,Euler前向迭代可能削弱其耗散性能并引发振动,团队因此根据力输入、控制器参数及采样时间等因素提出了离散系统采样时间约束,以保证SFC控制器在实际使用中的稳定性。
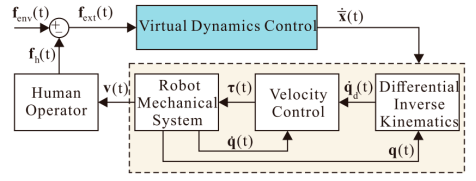
在pHRI场景中,人机耦合稳定性非常非常重要。团队详尽设计了SFC控制器部署方案,构建了涵盖操作者模型、力信号处理、虚拟动力学控制和速度控制模块的互联架构。团队提炼模型整合了操作者阻抗与机器人导纳特性,符合人机耦合根本原则,并通过深度分析模块间相互作用,确立了SFC控制下确保人机耦合稳定性的条件,为提升pHRI安全性和效率打下了扎实理论基础。
研究团队着重解决为SFC选择正真适合参数以适应不一样应用,借助描述函数分析SFC时域和频域响应,得出三个关键结论:推论1揭示了外力大小与系统带宽的关联性,控制带宽随外力减小而收缩,从而避免机器人对微小振动过度响应,研究者可根据真实的情况调整非线性指数和阻尼参数以适应需求。推论2指出了系统时间常数随外力变化规律,轻触时响应时间长以保证交互平稳,强作用时SFC通过缩短时间常数确保快速准确响应。推论3阐述了增益与幂指数的关系,非线性系统中增益随输入增大而递减,衰减程度由幂律指数决定,需选取适宜指数避免系统异常。
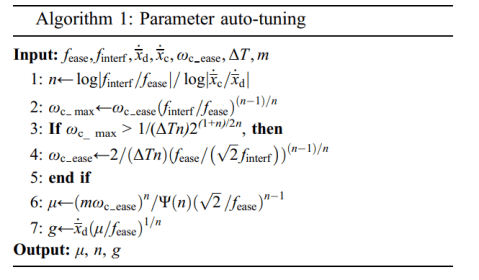
基于以上推论及稳定性条件,团队提出一套实用的SFC参数整定算法:首先计算适合的幂率指数对应力-速度关系;其次确定冲击状态下的系统带宽,并保证牵引时平滑响应,检查并修正带宽稳定性;之后选择恰当虚拟惯量,计算满足带宽要求的表观阻尼;最后计算系统增益调整系数以精细调节控制器整体增益。该算法旨在考虑人机交互动态响应需求、牵引力要求、冲击力限制及SFC带宽,最终得到满足所有标准的控制器参数。
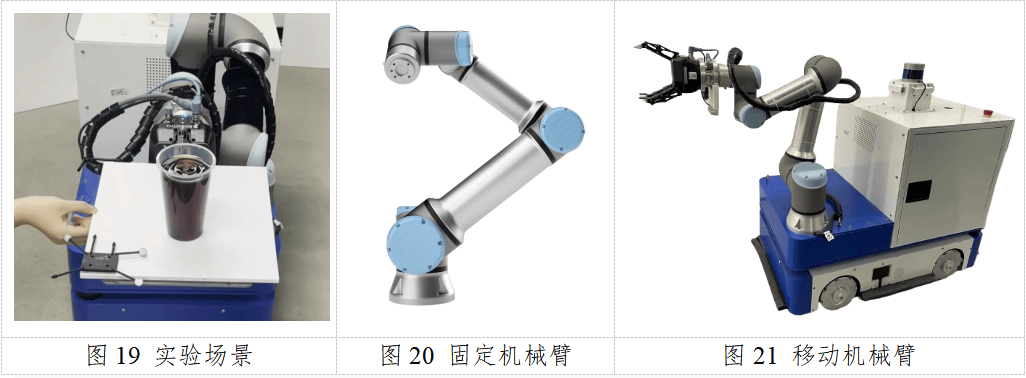
研究团队通过实验证实SFC在pHRI中的性能,设计实验让操作员与机器人协作握持装水杯的托盘,在有冲击干扰时稳定送达目标。实验对比分析L-AC、N-AC和SFC在固定(500Hz UR16e)和移动(9自由度、370kg麦克纳姆轮平台、50Hz控制频率)机械臂上的表现。
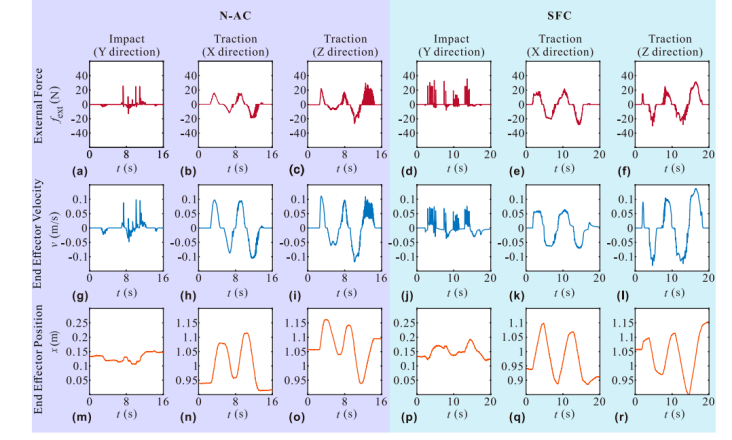
研究团队通过直观实验考察控制器在人机交互中的柔顺性,实验中机器人末端执行器受约6N牵引力做往复运动,三种控制器响应相似,均确保了约0.05m/s的速度和平稳移动。冲击实验中,当施加40至70 N冲击力时,L-AC控制器下末端执行器速度波动大,导致水溢出;N-AC虽有所改善,但面对70 N冲击力时仍失效。而SFC控制器在所有测试中将速度跳变控制在0.1m/s内,明显提高了抗冲击能力和水杯运动稳定性,从70N冲击下的位移对比也可看出SFC在实际应用中性能更优。
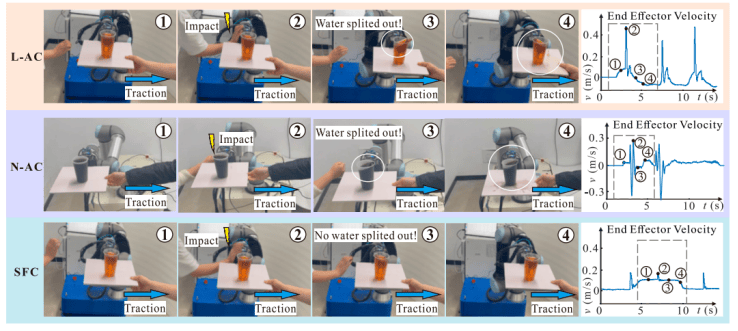
研究团队进一步测试了机器人在牵引中受冲击时的动态响应。实验表明,在L-AC控制下,70N冲击导致速度突变0.5m/s和35cm位置漂移,引起水溅出;N-AC虽有所改善但仍未能避免水溅(速度0.3m/s,位置漂移4cm)。相比之下,SFC控制器将速度跳变降至0.18m/s,位置偏移减小到1cm,维持了稳定牵引。此外,团队还研究了正交牵引方向受冲击的情况,发现N-AC在正交冲击下易引发Z轴0.1m/s振荡,推测源于其阻尼项与力直接关联引起的非线性效应和极限环。而SFC通过最大限度地考虑系统耗散性、人机耦合稳定性和离散约束条件,有效解决了此类问题。
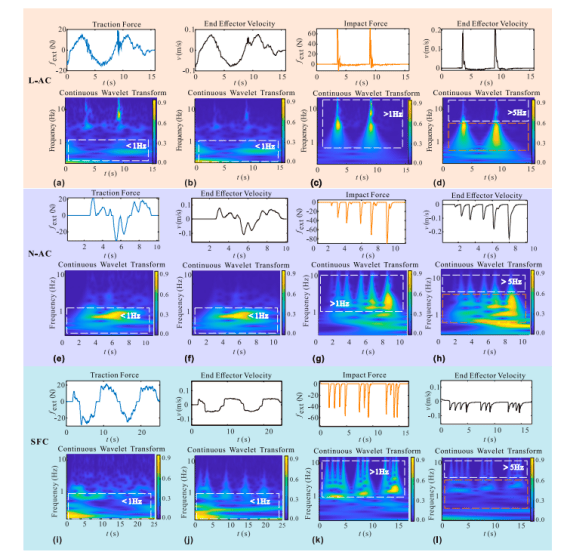
采样时间对控制器性能至关重要,研究团队通过移动机械臂水输送实验对比了SFC、L-AC和N-AC在长采样时间下的响应。实验显示三种控制器均保证了1 Hz内的信号能量传递及机器人柔顺性,但L-AC在高强度冲击下抑制能力不够,减小带宽会牺牲响应速度和舒适度。N-AC虽增益随外力增大衰减,但衰减不充分,尤其在50 N以上冲击时抑制能力弱,也许会出现能量增强及自激振荡。相反,SFC在保持低频牵引顺应性的同时,能有效抑制1 Hz以上冲击能量,展现出在高强度冲击下的性能优势。
研究团队通过工厂示范案例演示,展示了配备SFC控制器的移动机器人在与人协同工作时表现出卓越性能。在动态非结构化的工厂环境中,机器人与操作员一起抬起的桌子,桌上放置有开盖水瓶。机器人能有效应对突发冲击,如抵挡飞来的球体撞击,保持桌面水瓶稳定。视频记录了机器人在真实的操作中的适应性和稳定能力,如抵抗抛掷冲击、灵活避障、稳定协同以及在复杂路径如L型通道中的稳定移动。最终,机器人与人默契配合,成功完成重物定点摆放任务,突显了SFC控制器在保障人机协作、提升工作效率和动作可靠性方面的优势,为未来实际应用中此类控制技术的设计与实施提供了实践指导和理论启示。
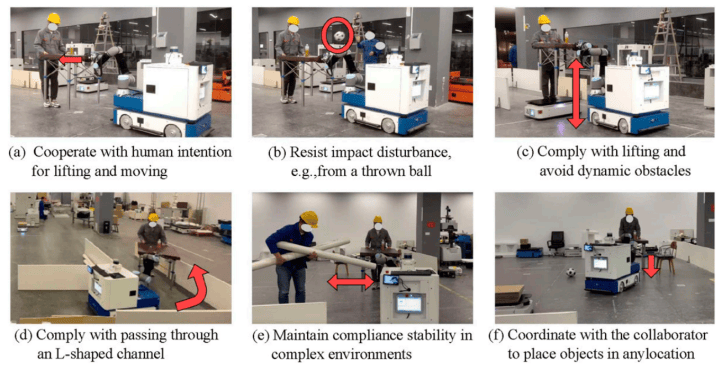
图29 在动态非结构工厂环境中SFC控制机器人的实例演示返回搜狐,查看更加多




