直流伺服体系解析直流伺服体系的组成、结构及其操控原理
时间: 2024-10-06 21:19:38 | 作者: 大事纪要
电机绕组、测速电机绕组、测速电机换向器,所述的转子铁芯由矽钢冲片叠压固定在电机转轴上构成。伺服主要靠脉冲来定位,基本上能这样了解,每旋转一个视点,都会宣布对应数量的脉冲,这样,和伺服电机承受的脉冲形成了照应,或许叫闭环,如此一来,体系就会知道发了多少脉冲给伺服电机,一起又收了多少脉冲回来,这样,就可以很准确的操控电机的滚动,以此来完成准确的定位,可以到达0.001mm。
直流伺服电机特指直流有刷伺服电机电机本钱高结构较为杂乱,发动转矩大,调速规模宽,操控简单,要保护,但保护不方便(换碳刷),会发生电磁搅扰,对环境有要求。因而它不可以适用于对本钱灵敏的一般工业和民用场合。
直流伺服电机还包含直流无刷伺服电机电机体积小,重量轻,出力大,呼应快,速度高,惯量小,滚动滑润,力矩安稳,电机功率有限制做不大。简单完成智能化,其电子换相方法灵敏,可以方波换相或正弦波换相。电机免保护不存在碳刷损耗的状况,功率很高,运转温度低噪音小,电磁辐射很小,长寿命,可用在一切环境。

(2)相敏放大器:将沟通电压转换为与之成正比的直流电压,并使它的极性与输入的沟通电压的相位相适应。
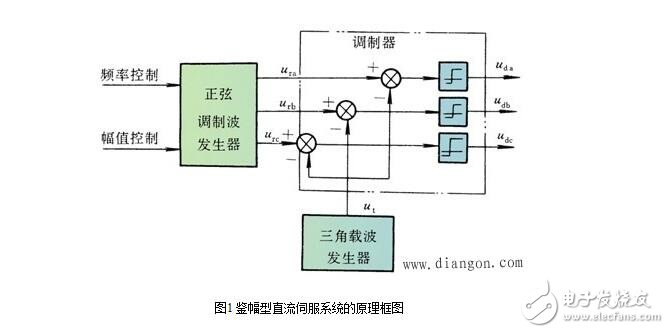
基本原理:运用大功率电器的开关效果,将直流电压转换成必定频率的方波电压,经过对方脉冲宽度的操控,改动输出电压的平均值。
在作业过程中,四个功率晶体管都处于开关状况,开关损耗大,且简单发生上、下两管直通的事端。为防止上、下两管一起导通,在一管关断和另一管导通的驱动脉冲之间,应设置逻辑延时。
影响伺服体系的稳态精度,导致体系发生稳态差错的要素有以下几个方面:由检测元件引起的检测差错;由体系的结构和输入信号引起的原理差错;负载扰动引起的扰动差错。
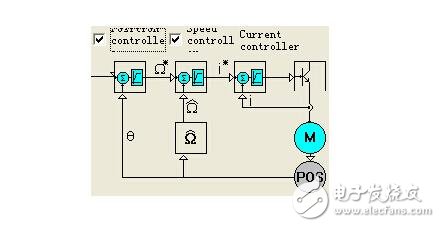
直流伺服和沟通伺服类似,可以运用操控器开环操控方法,操控器半闭环操控和全闭环操控体系。
直流伺服体系操控面板结构如下,面板右侧为与直流伺服电机接口板的接口,包含电机驱动接口和编码器接口;左边为与运动操控器面板的接口,包含方位操控形式接口和速度操控形式接口。
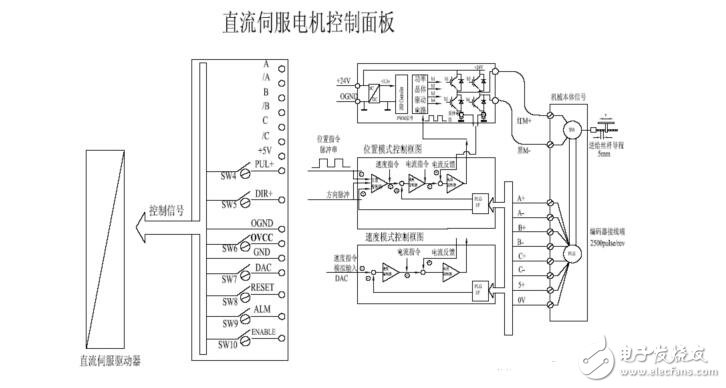
A+,A-,B+,B-,C+,C-,5+,0V信号为编码器信号,用于反应电机轴的实践方位。
RESET,ALM,ENABLE为操控信号,别离表明驱动器的复位,报警以及使能功用。
选用方位形式时,输入操控信号为脉冲和方向(或是正负脉冲),选用速度形式时,输入操控信号为模拟量。驱动器将输入信号转化为速度操控信号,经过速度操控器转化为电流操控信号,电流信号经过PWM回路效果于功率扩展模块的输出模块,最终施加给电机。
IDM240/640是嵌入式智能、高精密、全数字化的伺服驱动器,可驱动方波或正弦波无刷伺服电机(PMSM),直流有伺服电机,经过CAN或RS-485接口可组成多达256个轴的分布式智能网络运动体系,嵌入的高档可编程运动言语(TML)供给各种高档运动操控和plc专用功用。
高档图形化评价剖析编程东西EasyMoTIon Studio渠道快速设置电机、驱动器参数及编程运动程序,TML_LIB函数库是智能化伺服驱动器在 PC上履行运动操控使用的一个函数库,在C/C++、Basic、Delphi、Labview开发的使用程序中调用库中的.DLL文件履行后,能直接与驱动器通讯、设置参数、查询状况、传送指令、界说运动事情,测验输入输出口状况等。
Starter Kit for IDM640:包含驱动器的完好组件,包含一个IDM640驱动器,一个电机,一个I/O板,EasyMoTIon Studio软件,以及使用程序的协助和完好文件。是测验您的运动操控程序的理想实验渠道。如上所述均包含在一个可当即运转、即插即用的组件中。
加于直流电机的直流电源,借助于换向器和电刷的效果,使直流电机电枢线圈流过的电流,方向是交变的,从而使电枢发生的电磁转矩的方向稳定不变,保证直流电动朝确认的方向接连旋转。




